Технологии
- Трехэтапный план
- Функциональный подход
- Системная архитектура
- Автономная навигационная система
- Оптическая система анализа ситуационной обстановки
- Система координированного управления движением
- Расширение систем управления техническими средствами
- Пульт дистанционного управления
- Аппаратное обеспечение а‑Нав
- Передача данных и кибербезопасность
- Мостиковый планшет
- Караванное управление
- Нормативное регулирование
Расширение систем
управления техническими средствами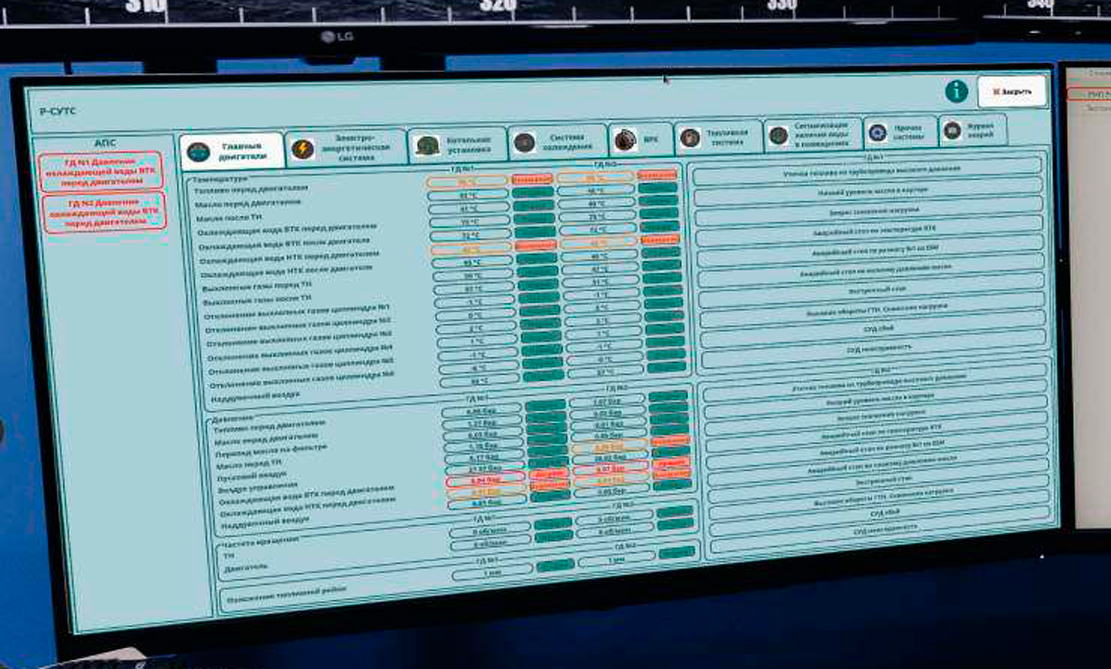
Р-СУТС относится к существующей функциональности традиционных систем управления техническими средствами судна (СУТС). В силу этого, как и в случае с СКУ, в качестве Р-СУТС в составе комплекса а‑Навигации могут использоваться любые существующие на рынке СУТС с возможностью дистанционного выполнения своих задач. Ключевой задачей Р-СУТС является передача и отображение информации от штатной СУТС на ПДУ.
Р-СУТС обеспечивает:
- контроль состояния технических средств судна с автоматической выработкой сигналов и рекомендаций по действиям в предусмотренных ситуациях;
- передачу в АНС и СКУ статуса работы движительных и рулевых устройств (опционально, при отсутствии прямого подключения у этих систем);
- квитирование и просмотр истории событий;
- передачу инструкций по эксплуатации технических средств судна.
Передача информации на ПДУ осуществляется Р-СУТС в автоматическом и ручном режимах. В автоматическом режиме на ПДУ выводится информация о любых нештатных ситуациях, обнаруженных Р-СУТС в судовых системах. При возникновении нештатной ситуации подается сигнал и автоматически выводится сообщение соответствующей судовой системы с указанием параметров, отклоняющихся от номинальных значений. В зависимости от согласованной функциональности Р-СУТС, персоналу могут автоматически выдаваться инструкции по действию в нештатных ситуациях.
Вместе с ПВН, Р-СУТС позволяет выполнять функции обхода и проверки помещений, груза и технических средств судна без непосредственного присутствия человека. Сегодня суда, оснащенные СУТС и имеющие соответствующий класс автоматизации, уже не требуют постоянного присутствия человека в машинном отделении - задачей а‑Нав является следующий шаг: отсутствие необходмиости постоянного присутвия человека на мостике для управления судном.